观察星空的方向是怎样「观星辨方向现代航天器是如何利用浩瀚的星空来为自己导航的」
太空中的航天器
随着现代科技的飞速发展,当然解决的方法是很多的,我们今天就要来介绍其中的一种应用是十分广泛的方法:天文导航,就是
假如有一天你睁开眼,发现自己变成了一颗静静的在太空中翱翔的飞行器,看向远处,映入眼帘的是浩瀚的星空空,四周昏暗辽阔,静谧无声,无边无际。在一片迷茫中,你可能会迷茫的问自己:"我是谁?我在哪?地球呢?"这直击灵魂的三连问,正是太空中所有飞行器时时刻刻都考虑的问题。那么怎么来帮助太空中的飞行器搞清楚它们每一个时刻所在的位置,姿态,以及与地球的相对位置呢?

太空中的航天器
随着现代科技的飞速发展,当然解决的方法是很多的,我们今天就要来介绍其中的一种应用是十分广泛的方法:天文导航,就是利用映入眼帘的浩瀚的星空来进行导航。天文导航技术是一门既古老又年轻的技术,起源于航海,发展于航空,辉煌于航天。天文导航是以已知准确空间位置的自然天体为基准,通过天体测量仪器被动探测天体位置,经解算确定测量点所在载体的导航信息。天文导航因其具有自主、误差不随时间积累和精度较高的特点,成为现代重要的一种导航手段。
二、原始的天文导航的天文导航最早从航海发展而来,起源于中国。天文航海技术主要是指在海上观测天体来决定船舶位置的各种方法。中国古代航海史上,人们很早就知道观看天体来辨明方向。西汉《淮南子 齐俗训》中记载:"夫乘舟而惑者,不知东西,见斗极则悟矣。"意思是在大海中乘船可利用北极星确定方向。晋代葛洪的《抱朴子外篇 嘉逛)上也说:"夫群迷乎云梦者,必须指南以知道;并乎沧海者,必仰辰极以得反"。意思是如在云梦(古地名)中迷失了方向,必须靠指南车来引路;在大海中迷失了方向,必须观看北极星来辨明航向。

北极星

古代航海,夜晚靠星空指引方向
一直到北宋以前,航海中一直是"夜间看星星,白天看太阳",只是到北宋才加了一条在阴天看指南针",大约到了元、明时期,我国天文航海技术有了很大的发展,能够观测星的高度来定地理纬度。这种方法当时叫"牵星术"。牵星术使用的工具叫牵星板。牵星板用优质的乌木制成,一共12块正方形木板,最大的一块每边长约24cm,以下每块递减2cm。最小的一块每边长约2cm。另有用象牙制成二小方块,四角缺刻,缺刻四边的长度分别是上面所举最小一块边长的1/4、1/2、3/4和1/8。比如用牵星板观测北极星,左手拿木板一端的中心,手臂伸直,眼看天空,木板的上边缘是北极星,下边缘是水平线,这样就可以测出所在地的北极星距水平的高度。高度高低不同可以用12块木板或象牙块替换调整使用。求得北极星高度后,就可以计算出所在地的地理纬度。

北宋航海时,增添了指南针这一装备
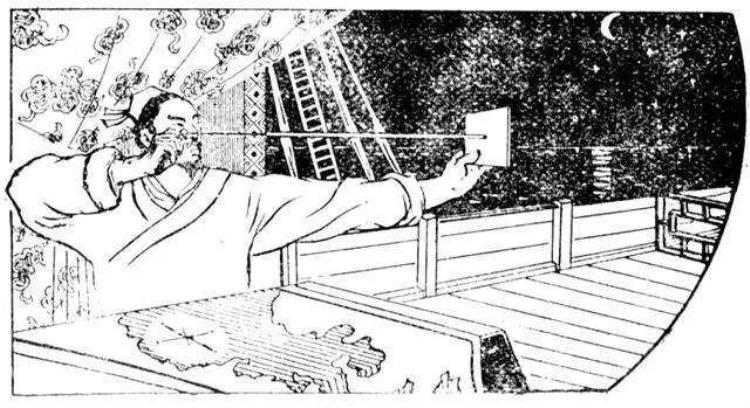
牵星术操作示意图
明末郑和船队在七下西洋中,以"过洋牵星图"为依据,把航海天文定位与导向仪器罗盘结合起来应用,大大提高了测定船位和航向的精度。这种天文航海技术代表了15世纪初天文导航的世界水平国。明代牵星,一般都是牵北极星;但在低纬度(北纬六度)下北极星看不见时,改牵华盖星(小熊座βY双星)。明代在航海中还定出了方位星进行观测,以方位星的方位角和地平高度来决定船舶夜间航行的位置,当时叫观星法。流传下来的明末抄本航路专书中有太阳、月亮的出没时间表,还有"定太阳出没歌"和"定太阴出没歌"。
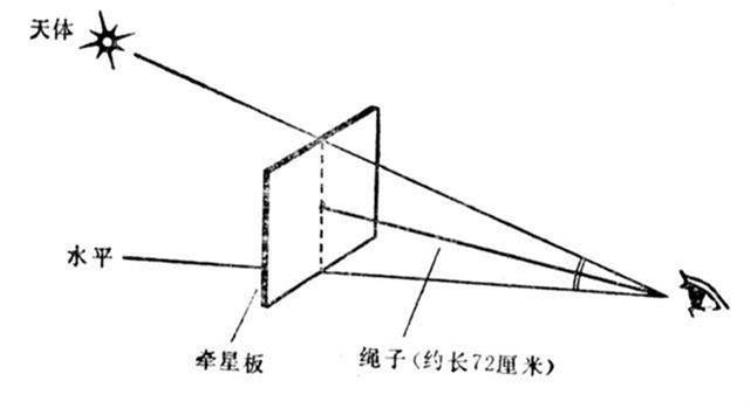
牵星术原理图
同中国的牵星术一样,欧洲人很早也知道了测量天体角度来定位的原理。古代希腊人称之为"迪奥帕特拉"。中世纪早期北欧海盗通常也这样做。他们在航海中可以利用任何简陋的工具,例如一只手臂、一个大拇指,或者一根棍子,来使观察到的天体角度不变以保持航向。约在1342年左右,这一原理用到了地中海的航海中,这里的航海家使用一种很简单的仪器来测量天体角度,称之为"雅各等"。雅各竿是顶端连在一起的两根竿子,观测者将底下一根与地平线平行,上面一根对准天体(星星或太阳),就能量出天体高度角。然后利用高度角来计算纬度和航程。
当然了以上所谈都是比较原始的天文导航,能为人们指引方向,但是导航的精度十分粗糙。这对于现代卫星等各种航天器来说显然是无法适用的。那么现代的航天器又是怎么通过天文信息来实现实时定位与导航的呢?
三、现代的天文导航在20世纪六七十年代,星象图像尚以胶片进行成像,但随着需要人工辨识和处理的星象照片越来越多,人们萌发了研究星图识别算法的想法,这是星图识别的开端,也是现代天文导航得以实现的开端。随着航天技术的发展,星图识别技术不断发展。现代的航天器利用天文信息进行导航时,有利用遥远的恒星信息的,也有利用太阳、月球甚至地球信息的。不过其原理都大同小异,今天我们主要介绍航天器是如何利用遥远的恒星来进行导航的。

首先大体的介绍一下基本原理,要想利用密密麻麻的星空来导航,我们当然要先有一份完整而精确的星空图,图中需要完整的记录下每个恒星的位置信息,以及亮度信息。为了方便使用,我们通常把这些信息整理成表格,也就是所谓的星表。有了星表就相当于有了一张太空的"地图",那么航天器接下来要做的事情就是打开相机,咔嚓,咔嚓照几张星空的照片,然后将照片信息与太空"地图"相匹配,确保照片中的闪闪发光的星星与星表中记录的能够一一对应,这样航天器就能够通过星表,找到自己与一些恒星的相对位置,从而能够反算出自己在哪了。
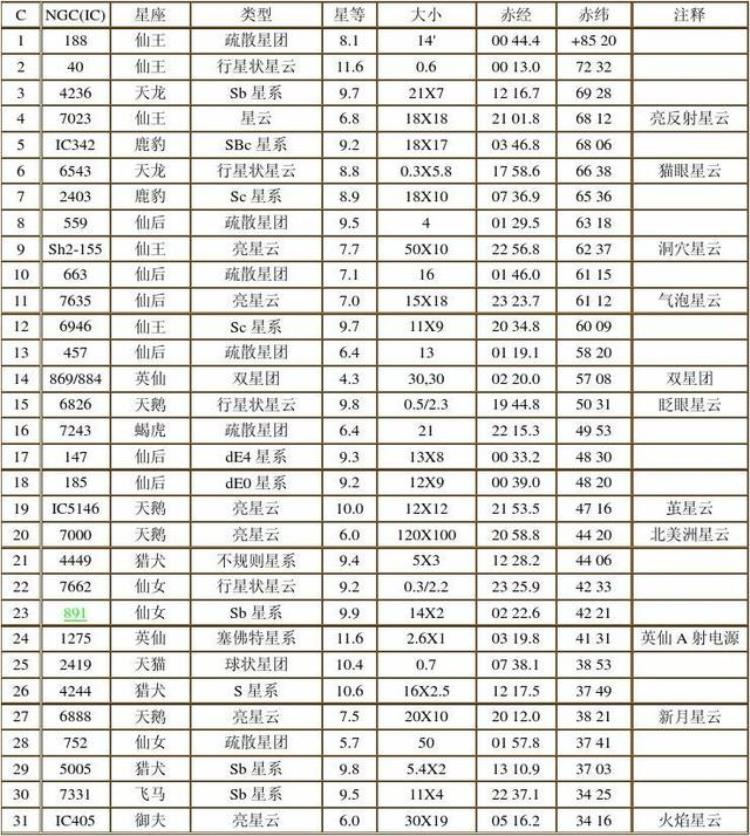
部分星表示意图
不过茫茫星海,怎么才能将航天器所在的位置与提前制作好的星表一一对应的匹配呢?那就是使用计算机喽。不过计算机只有0,1,0,1,这种快速而简单的计算能力,它并不知道具体怎么做,所以还需要人们开发具体的算法来实现星图的匹配。航天技术发展到今天,人们已经开发出了许许多多的算法。星模式识别算法有很多种,主要包括三角形角距匹配算法、主星识别法、概率统计法、多边形角距匹配算法、栅格算法等。
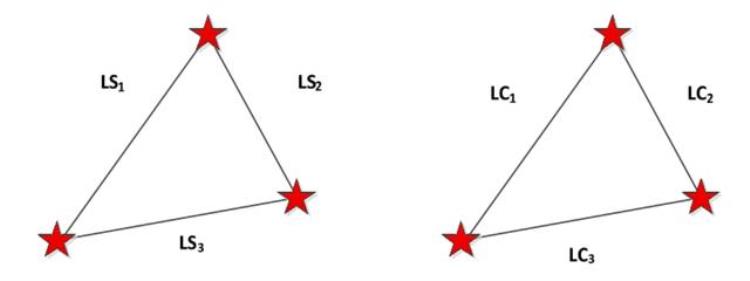
三角匹配法,只要两个三角形三条边,或者两条边以及两边的夹角能够与星表匹配上,就完成匹配
其中三角形匹配算法是被应用得较多的算法。三角形识别算法是将星敏感器观测到的星组成观测星三角形,并与导航星库中的导航三角形进行匹配,实现起来比较容易。基本思想很简单,就是在航天器利用星敏感器捕获的星图照片中挑选出三颗比较亮,并且不在同一条直线上的恒星,然后根据一些物理关系,计算出三颗恒星组成三角形的边长,或者是两条边的边长以及这两条边的夹角。然后去检索星表,在星表中找出对应的恒星,从而实现星图的识别匹配。基本原理很简单,但是实际应用起来可能会很头大。因为你可能发现检索出来的匹配结果不是唯一的,有一堆可以匹配的恒星。这就还需要利用恒星的亮度去做进一步的筛选;或者进一步改进算法,比如再增添一颗匹配星,用四颗星来进行匹配识别等等。
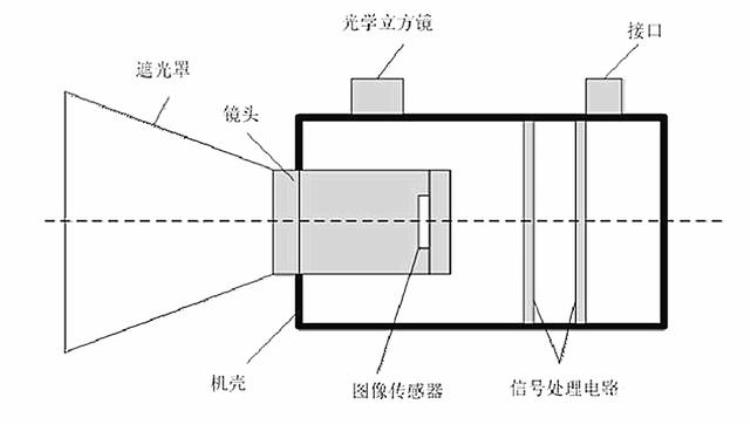
星敏感器,用来捕获航天器正前方视角内的星空图,以便于与导航星表匹配
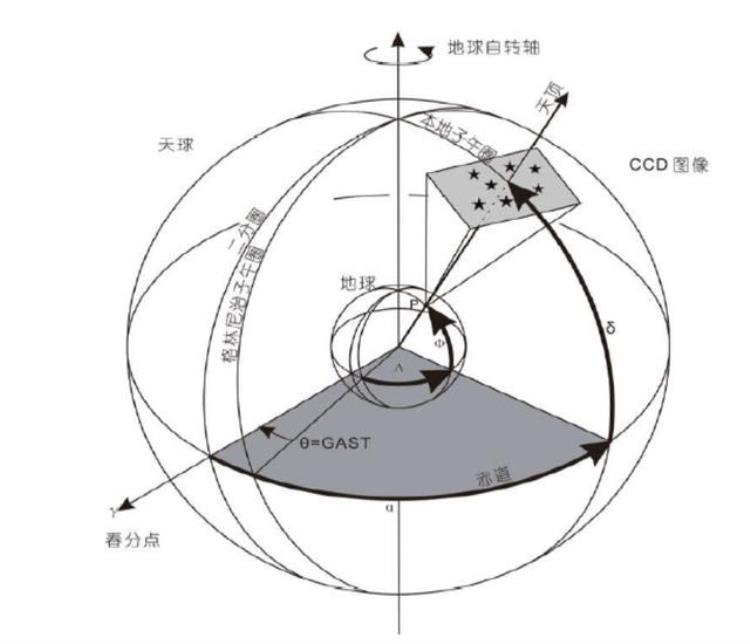
观测直观图
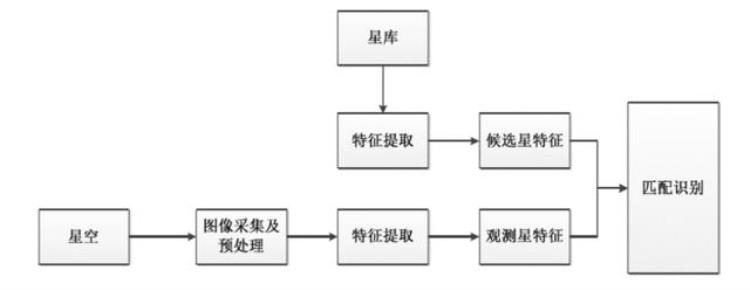
星图识别流程图
四、总结人们通过把小型计算机装载在航天内部,从而使得天文导航系统不需要其他地面设备的支持,所以是自主式导航系统。不受人工或自然形成的电磁场的干扰,不向外辐射电磁波,隐蔽性好,定位、定向的精度比较高,定位误差与定位时刻无关,因而无论是军用还是民用航天器,甚至在航空、航海领域,这种导航方式都得到了广泛的应用。通过现代计算机的加持,天文导航这个古老的导航技术在现代航天活动中焕发出蓬勃的生命力。
本文参加 #科学V计划# 内容为作者原创。#科学有真相#
文章评论